CARLA Ecosystem
Inverted AI provides state of the art generative AI to drive realistic, human-like non-player-character (NPC) behavior in driving simulations. Experts in AI, their mission is to enable the development of autonomous technology that safely anticipates human behavior.
Inverted AI's products integrate directly with CARLA through APIs to bring complex, realistic traffic behavior into CARLA simulations, accelerating the development of safe technology for autonomous vehicles and advanced driver assistance systems. Visit the website for more information.
To get access to these tools and more, follow this link.
Products
Vastly improve your simulation effort with human-like non-playable character (NPCs) that exhibit driving behaviors that are diverse, realistic, and reactive. Integrating DRIVE into your simulators means letting us take care of the hard work of driving your NPCs for you. We believe that validating and training using the most realistic behavioral distribution possible is essential. That's what DRIVE gives you.
INITIALIZE save simulation time by allowing you to start from a realistic and diverse set of initial conditions including agent density, types, speeds, placements, and orientations. No need to "burn-in" simulations any more. Just INITIALIZE them around your ego and other scenario elements.
SCENARIO enables a whole-scene guided scenario generation with realistic, reactive, and diverse agents including pedestrians, bikes, cars, buses, and lights. Synthetic logs and/or log fuzzing are the name of the game here. Currently in private beta.
BLAME determines which agent(s) caused a collision and why from logs to efficiently sort through testing, training, and validation simulation run results. Don't waste time looking at infractions that weren't your fault. Currently in private beta.
Open-source lightweight 2D driving simulator as an environment for ADAS/AV controller development.
Synkrotron provides solutions to manage CARLA driving simulations (OASIS Sim) and simulation data pipelines (OASIS Data) at scale, through intuitive web services, which can be integrated with most DevOps infrastructure.
OASIS Sim and OASIS Data are provided both as local solutions and also deployed through the cloud, leveraging scalable cloud services to parallelize workloads. A CARLA sponsor and consortium member, Synkrotron are exclusive agents for CARLA in China. Contact Synkrotron for information about services for research and industry.
Products
GUI-based simulation platform providing visual interfaces for every step of the AD simulation pipeline, from setup through to diagnosis, with the capacity to deploy on scalable cloud computing resources.
- Visual scenario authoring
- Sensor and vehicle setup
- Simulation task setup
- Analysis & Debugging
- Job management
- Deployment and integration
Apollo is an open-source L4 autonomous driving software stack used by many OEMs, solution vendors, developers and researchers. The CARLA-Apollo bridge connects the two popular open-source software packages, enabling Apollo software stacks to drive the CARLA simulator and receive, assimilate, interpret and visualize data through the extensively featured Apollo interface. Check out the GitHub repository.
OASIS Data streamlines the entire data management pipeline involved in autonomous vehicle R&D, including acquisition, filtering, annotation as well as scenario reconstruction.

AVL is one of the world’s leading mobility technology companies for development, simulation and testing in the automotive industry, and beyond. From ideation phase to serial production, the company covers vehicle architectures and platform solutions including the impact of new propulsion systems and energy carriers. As a global technology provider, AVL’s offerings range from simulation, virtualization and test automation for product development to ADAS/AD and vehicle software.

The company combines state-of-the-art and highly scalable IT, software and technology solutions with its application know-how, thereby offering customers extensive tools in areas such as Big Data, Artificial Intelligence, Cybersecurity or Embedded Systems.
Model.CONNECT™

Model.CONNECT™ is AVL’s co-simulation and integration platform for building virtual twins in a heterogeneous tool landscape. Analysis of the single models, I/O connection and co-simulation control can be performed using GUI or automatized through API.
Using Model.CONNECT™, CARLA environment simulation can be easily coupled with high fidelity vehicle simulation tools from AVL, such as AVL VSM™, facilitating the development of on- and off-road autonomous vehicles, with both physically and visually realistic features.
CARLA, combined with AVL simulation tools, is ideal for verification and validation tests within ADAS/AD automotive design, reducing costs associated with physical prototyping and real-world testing.
MathWorks® is a leading developer of mathematical computing software for engineers and scientists. MATLAB®, Simulink® and RoadRunner are key tools in the autonomous driving ecosystem for developing advanced perception, planning and control systems then integrating, testing and deploying them. MATLAB® and Simulink® come with their own ecosystem of libraries and tools to accelerate development and prototyping.
MATLAB® and Simulink® can utilize data generated by the CARLA simulator for training perception systems, and can be connected directly through the MATLAB® Python interface to interact with the CARLA simulator for validation and verification.
Products
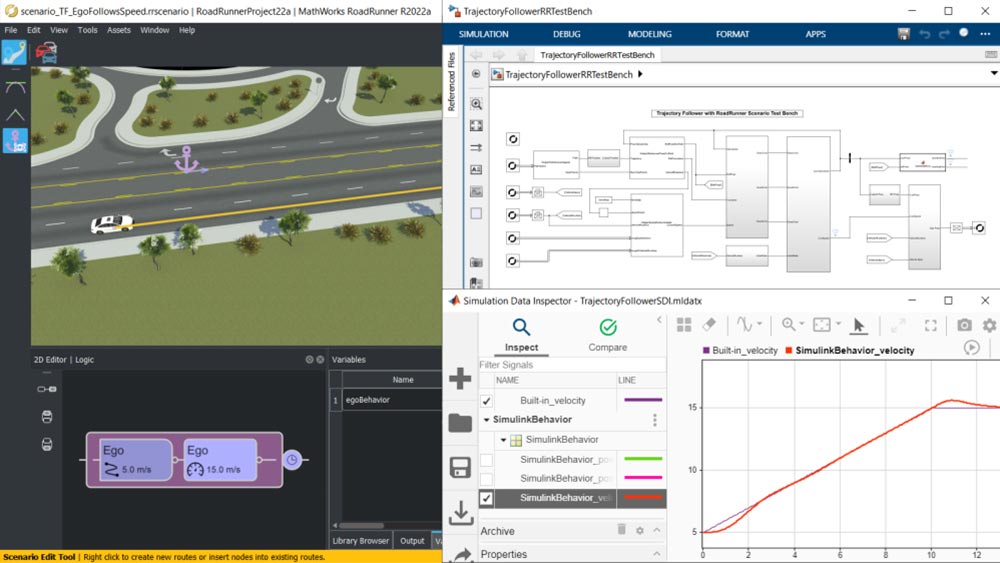
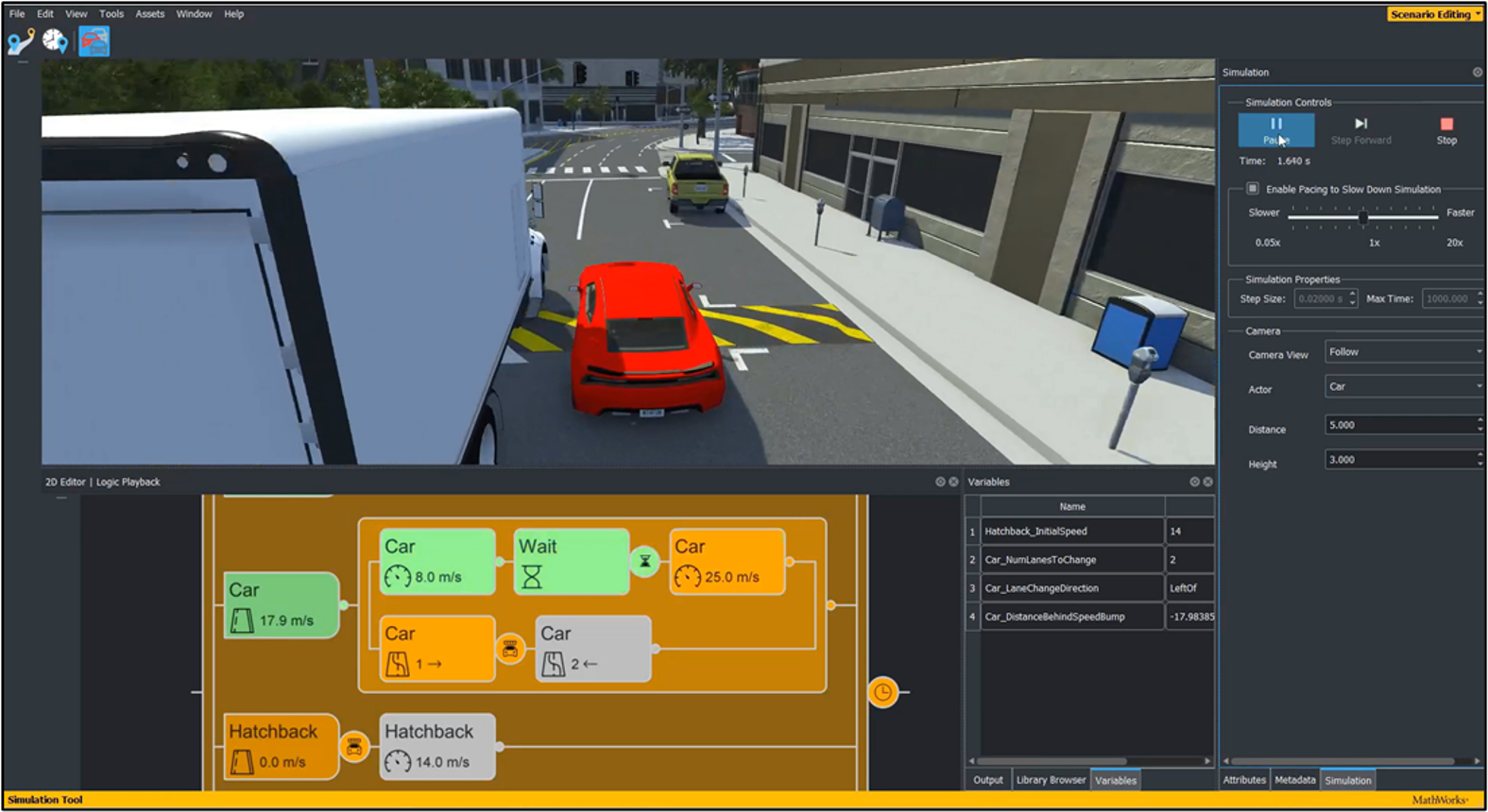
RoadRunner is an interactive editor for creating 3D scenes for simulation and testing of automated driving systems. It is a key tool in the CARLA ecosystem for creating road networks in the ASAM OpenDRIVE format. RoadRunner exports in the OpenDrive and FBX formats, which can be imported into the CARLA simulator as the basis of the CARLA driving simulation.
RoadRunner Scenario is an interactive editor for designing the trajectories, logic, and actions of vehicles and pedestrians in your CARLA simulations. These dynamic actors can be connected to CARLA using ASAM OpenSCENARIO® XML (1.X) and ASAM OpenSCENARIO® DSL (2.0) exports. RoadRunner Scenario includes MATLAB and gRPC APIs for controlling scenarios programmatically and you can set up actor behaviors in MATLAB® and Simulink®.
Ansys is a globally recognized technology provider, offering solutions for computer aided engineering and multi-physics simulation for product design, testing and operation.
Ansys provides software for simulation of structures, electronics and machine components, allowing extensive virtual testing prior to expensive physical prototyping. Ansys automotive tools can be combined with CARLA for development of autonomous driving systems and advanced driving assistance systems.
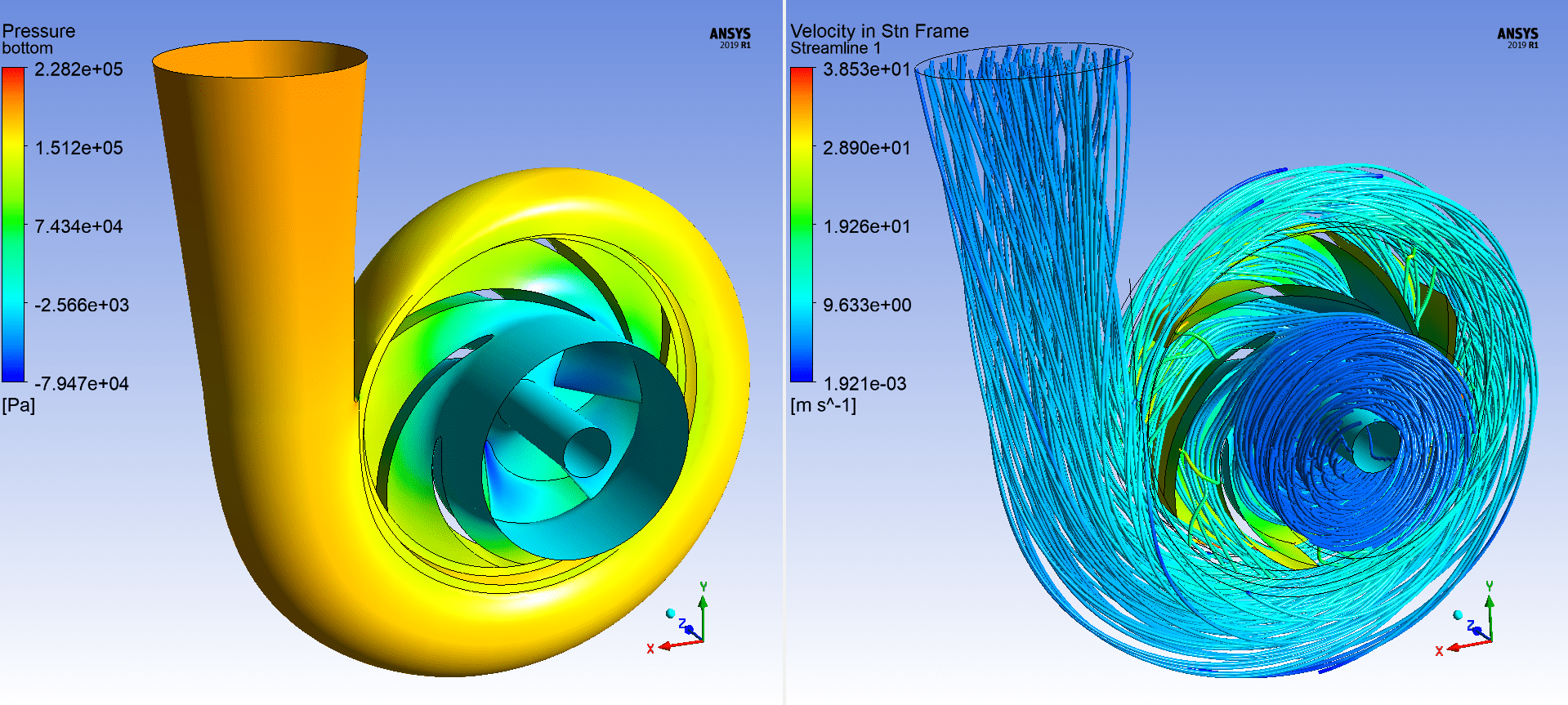
Real time RADAR
Ansys' Real Time Radar (RTR) model is a high-fidelity physics-based radar simulation that captures many of the real-world behaviours and artifacts of radar systems. Ansys RTR models multiple radar bounces and captures physics beyond line-of-sight sensing. It also supports a variety of electromagnetic material models.
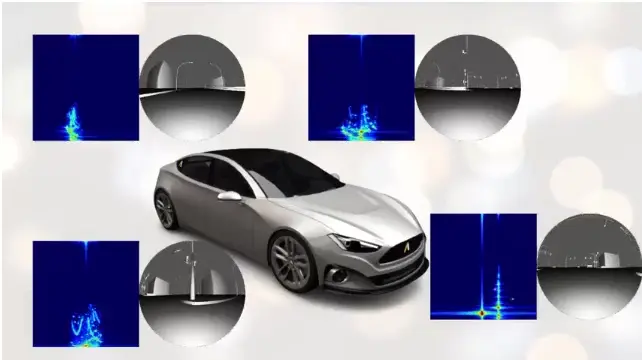
The RTR model has been integrated into CARLA to bring high-fidelity radar simulation into CARLA simulations using the Open Simulation Interface (OSI) to maintaining modularity and interchangeability as R&D progresses beyond simulation.
PTV Group is a leading global software company for traffic planning, simulation, and real-time management. With more than 40 years of experience in the fields of mobility, the Germany-based company provides software products based on proprietary algorithms ranging from microscopic and macroscopic modeling and simulation of traffic to real-time traffic management, benefiting more than 2,500 cities and municipalities.
PTV offers numerous software solutions for traffic, transportation and mobility for modeling traffic at macroscopic and microscopic levels with vehicles, pedestrians and cyclists.
Products
PTV Vissim is a microscopic multi-modal traffic flow simulation software package that digitally reproduces vehicles (cars, buses, trucks), public transport, cyclists and pedestrians. PTV Vissim is an industry leading traffic simulation solution trusted by traffic planners and engineers globally.
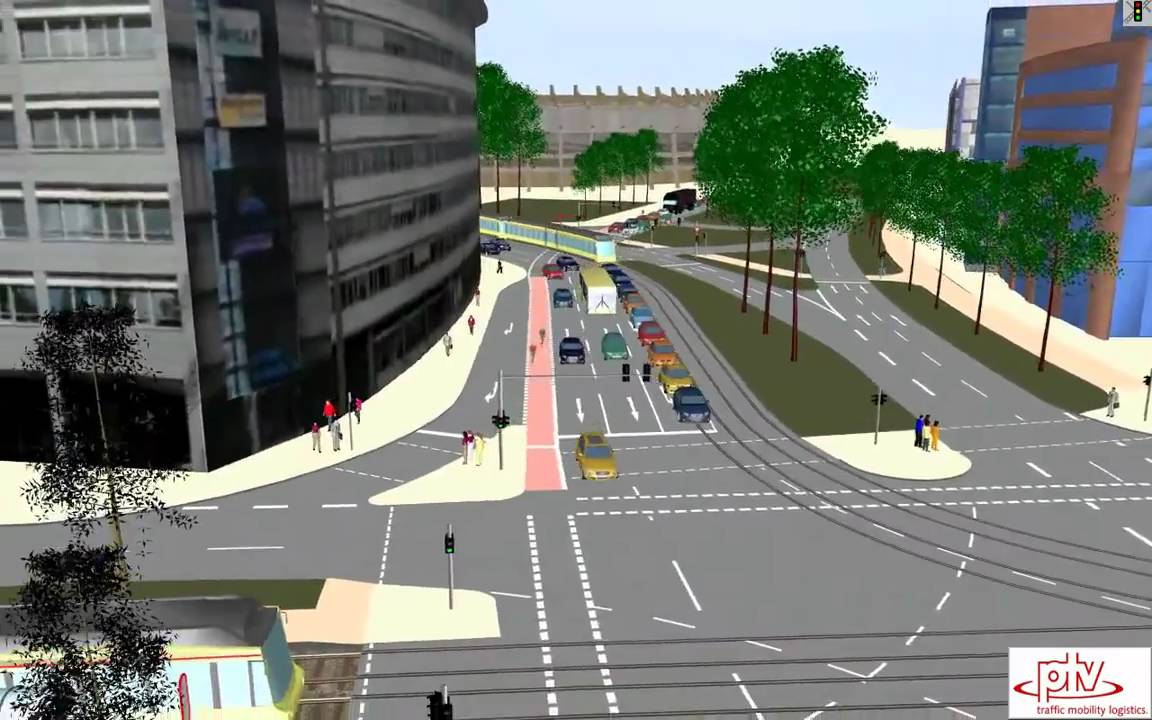
PTV Vissim can run in co-simulation with CARLA to bring realistic traffic behavior to CARLA simulations. Academia licenses are available for research centers. Get in touch to request a trial or ask about licensing options.
Open-source community efforts

Chrono is an open-source, platform independent multi-physics modeling and simulation infrastructure implemented in C++.
Chrono can interface directly with CARLA in co-simulation, leveraging its powerful physics engine to drive vehicles and other actors within CARLA through a high-fidelity physics simulation. Visit the GitHub repository.
Features
Multi-body dynamics
Chrono facilitates high-fidelity modeling of mechanisms made of multiple rigid bodies such as articulated robots and complex vehicles. Motors, actuators, springs and dampers can all be added to a model to simulate complex movement.
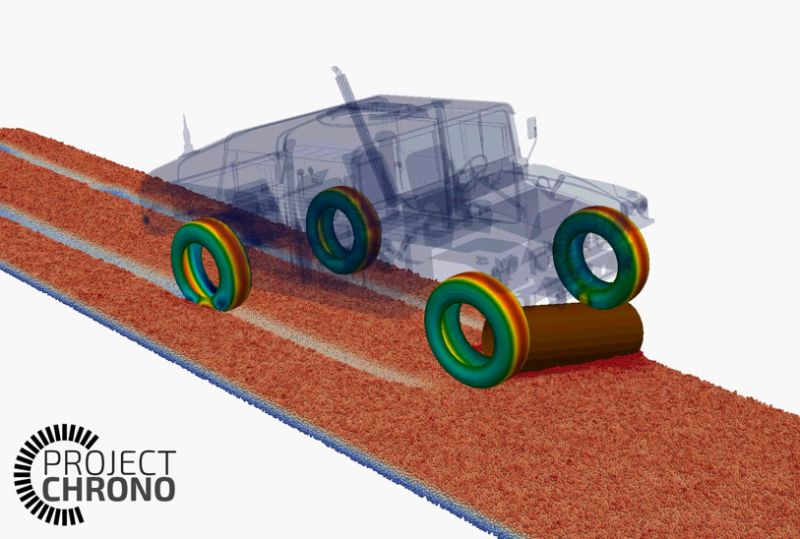
Terramechanics
Chrono serves as a powerful terramechanics modeling tool, with the capacity to implement soil contact models to simulate deformable terrain such as mud, sand or even lunar regolith, broadening CARLA's potential into off-road and industrial applications.
Smooth particle hydrodynamics
Chrono features an SPH solver to model the physics of fluid-solid interactions for bodies of water that autonomous vehicles might encounter, for example on flooded roads or in off-road applications.
Open API
Chrono's open API facilitates extensive customization and interconnectivity with other simulation tools, including CARLA. Chrono's optional plugin modules open up a vast array of physical modeling techniques to CARLA users.
Autoware is an open-source software stack for AV R&D, built on top of the Robot Operating System (ROS). It includes all of the necessary functions to control autonomous vehicles including sensing, perception and control.
Autoware enables developers to concentrate time on their specific innovations in autonomous driving, avoiding time spent on boilerplate code and utility functionality. CARLA developers can build their AV stack in Autoware, while using CARLA for simulation duties. Visit the GitHub repository.
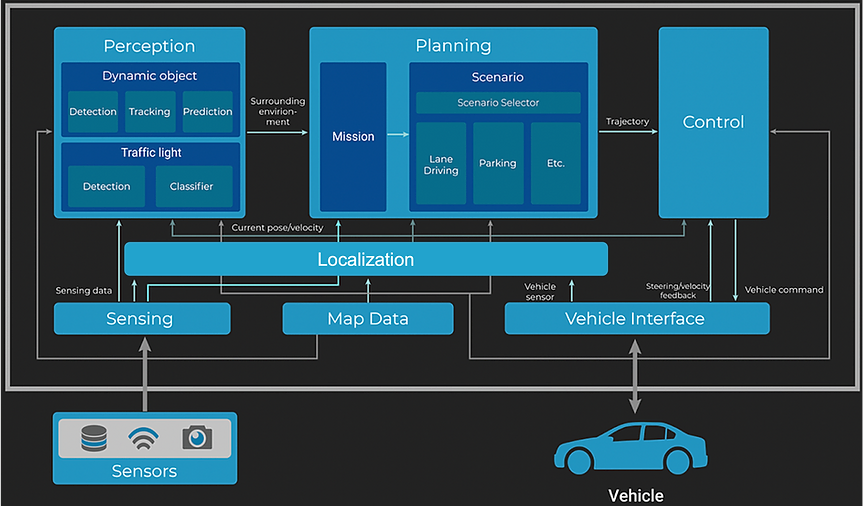
The Autoware stack
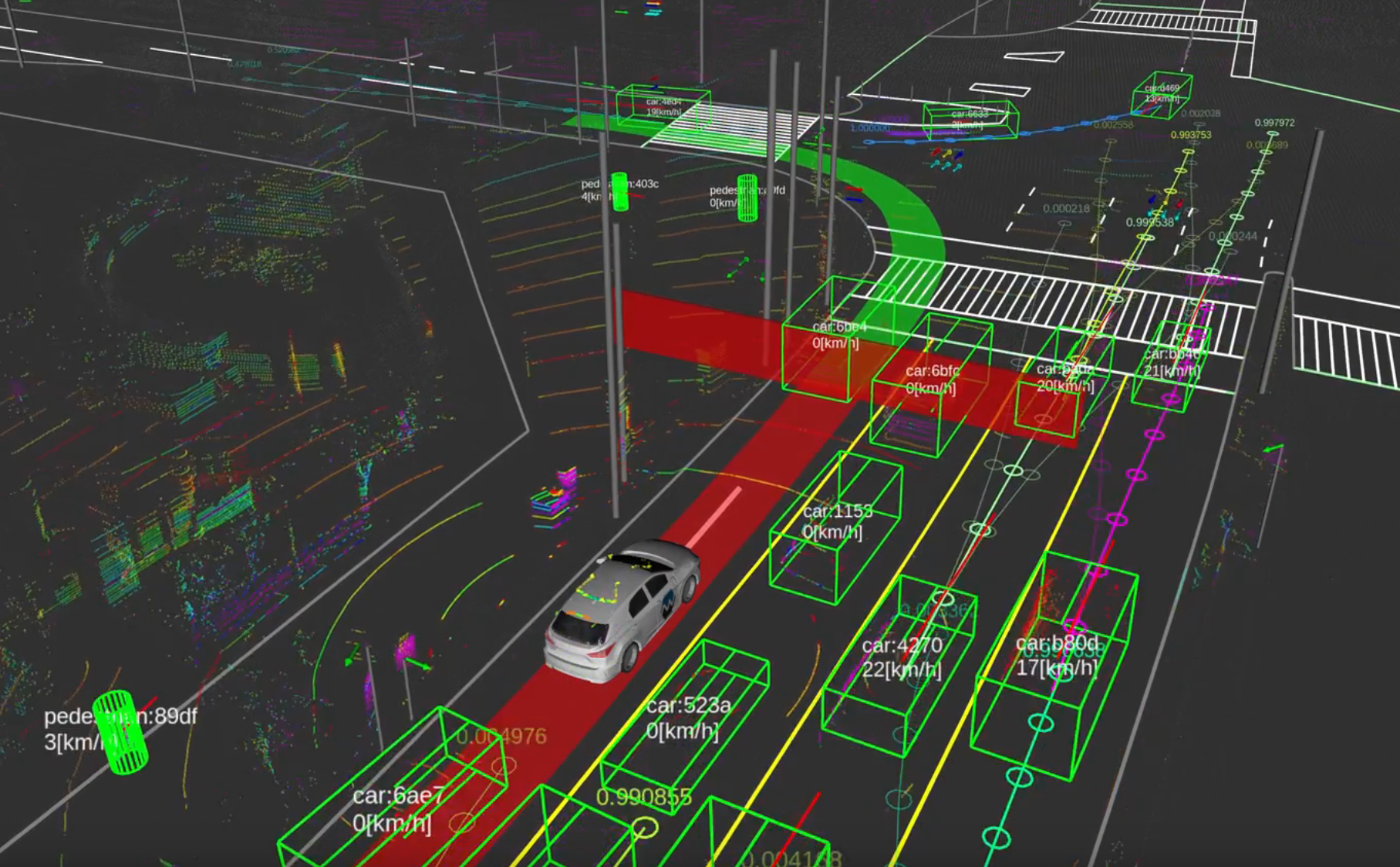
Autoware provides premade modules for all the tasks associated with autnomous vehicle control, including sensing, mapping, localization, perception, object detection, planning and control. This allows users to concentrate their efforts on developing their own modules which can be integrated into the Autoware stack with minimal time investment. Autoware's architecture encapsulates the entire process from inception to deployment of AV solutions. The open-source codebase encourages expansion, customization and community collaboration, accelerating the path from R&D to market.
Autoware can be connected directly to CARLA through CARLA's Python API and ROS interface, enabling immediate testing of Autoware based stacks in CARLA for validation and performance testing. Autoware is a powerful companion to CARLA for accelerating the AV development process.
The Robot Operating System (ROS) is an open source robotics middleware suite for developers working in robotics and AV. It is language and platform independent and can be deployed within a networked computing architecture.
CARLA offers a ROS interface that allows ROS-based AV stacks to communicate directly with the CARLA simulator.
The ROS ecosystem
ROS provides a diverse set of libraries and tools to help with the legwork of developing autonomous robots and vehicles. Modules are available that take care of standard tasks in AV such as perception, sensing and control. Its wide acceptance within the community means that a wealth of modules can be found in repositories for a wide variety of applications.
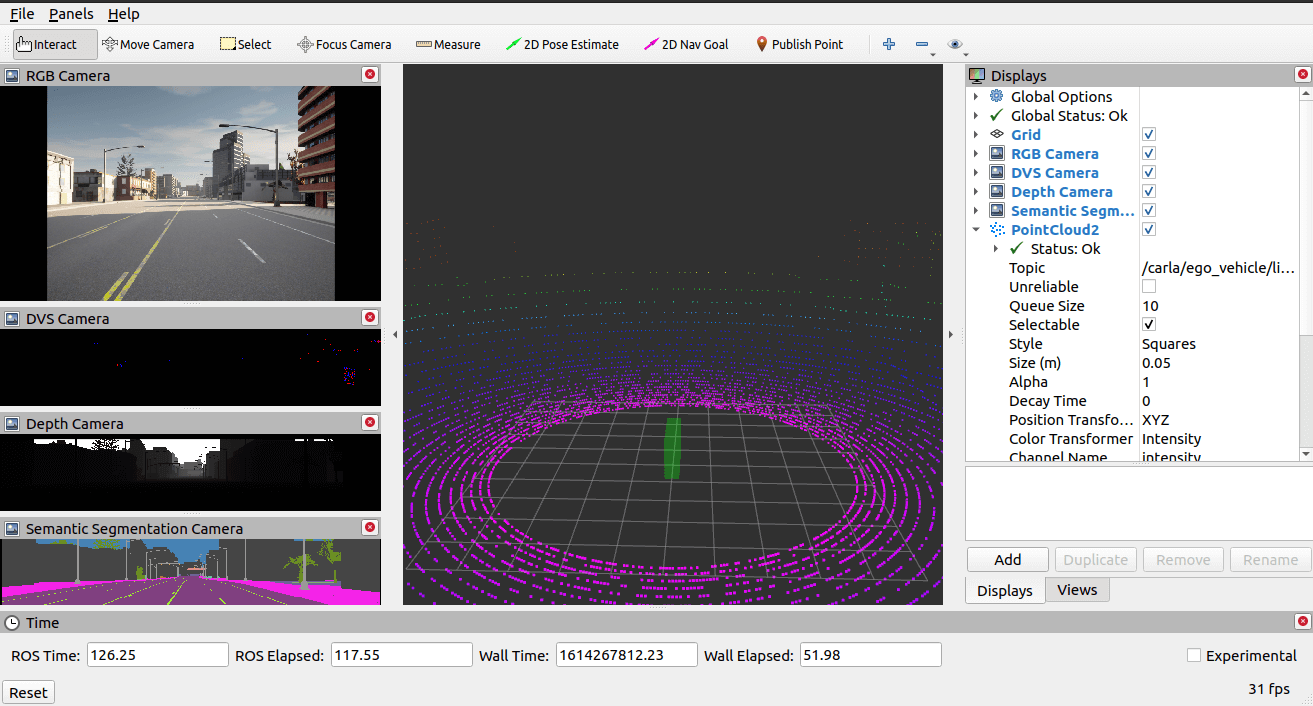
Interconnectivity
ROS also provides a standardized communication protocol that allows multiple ROS-based systems to communicate as nodes over a network. CARLA's ROS interface enables AV solutions built using ROS to communicate directly with the simulator, receiving sensing data and telemetry while sending control inputs through ROS topics.
Community
ROS has a wide footprint within the robotics and AV community, meaning there is a wealth of repositories online serving a diverse array of applications in multiple domains.
SUMO (Simulation of Urban MObility) is an open-source, multi-modal traffic simulation package designed to handle large traffic networks. Hosted as an Eclipse Foundation project, it is actively developed by a dedicated community of developers and is highly customizable.
SUMO can be used in co-simulation with CARLA to drive advanced traffic behavior inside CARLA simulations.
The SUMO traffic simulator
SUMO facilitates advanced multi-modal traffic simulation, including multiple vehicle types, public transport, bicycles, pedestrians and traffic lights. It is capable of modeling large scale networks with up to 10,000 edges.
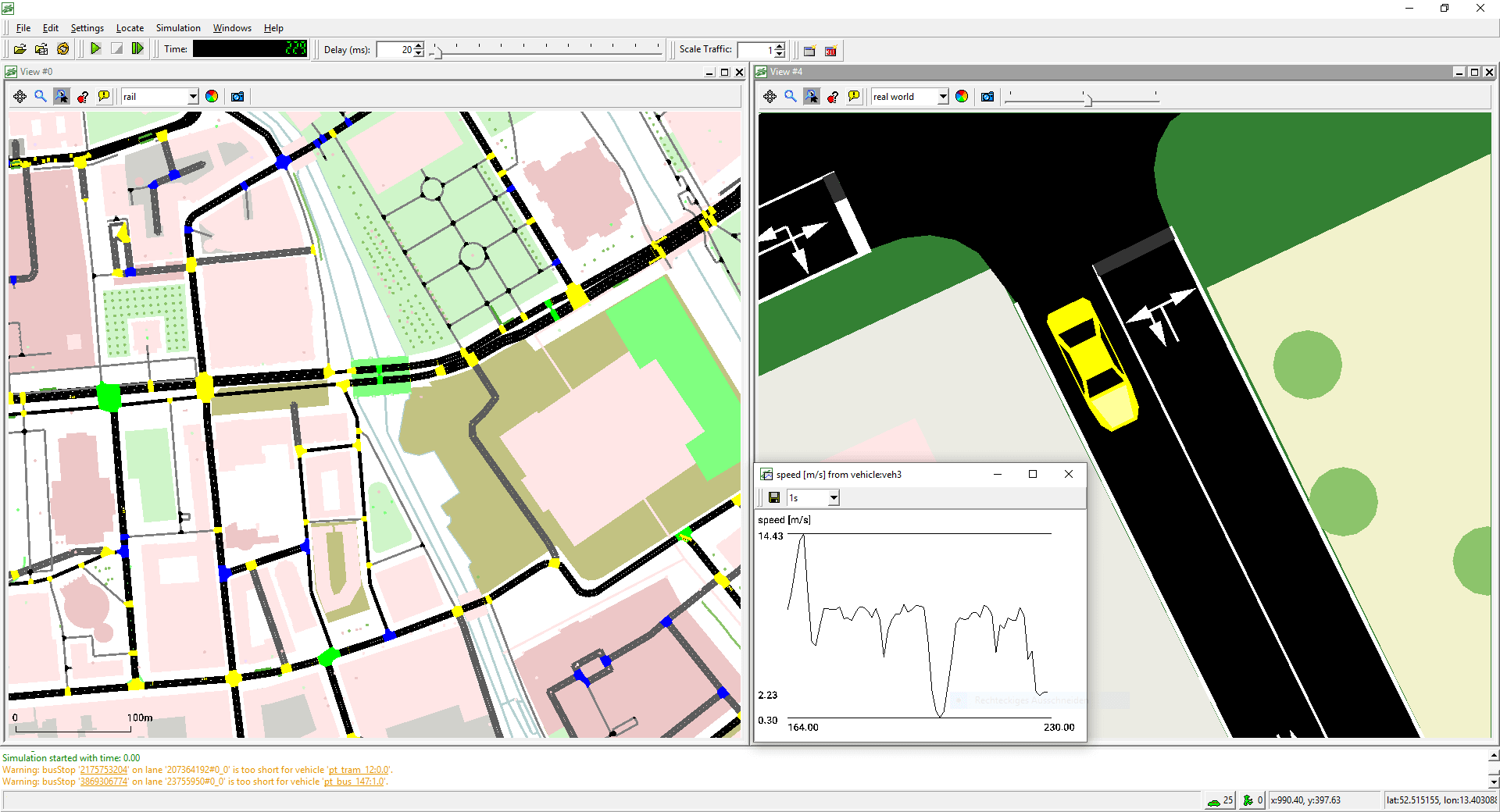
SUMO's graphical user interface allows for intuitive modeling and editing of traffic networks. It includes a suite of tools that handle tasks such as route finding, visualization, network import and emissions calculation. SUMO's open-source distribution model enables developers to integrate custom traffic models for specialized applications.
ASAM e.V. (Association for Standardization of Automation and Measuring Systems) is a non-profit organization that promotes standardization of tool chains in automotive development and testing.
Members include international car manufacturers, engineering service providers, and research institutes. ASAM standards are developed by experts from our member companies and are based on real use cases.

Standards
Common base for describing road networks with XML syntax, describing the geometry of roads, lanes, signals and roadmarks. Derived from synthetic or real road data.
Open standard for describing the dynamic content of scenarios for use in driving simulators. It describes the maneuvers of traffic participants like vehicles, pedestrians, and bicycles.